albris puede capturar y geolocalizar en formato de video, imágenes fijas y térmicas, todo en el mismo vuelo, sin aterrizar y sin necesidad de cambiar las cámaras.
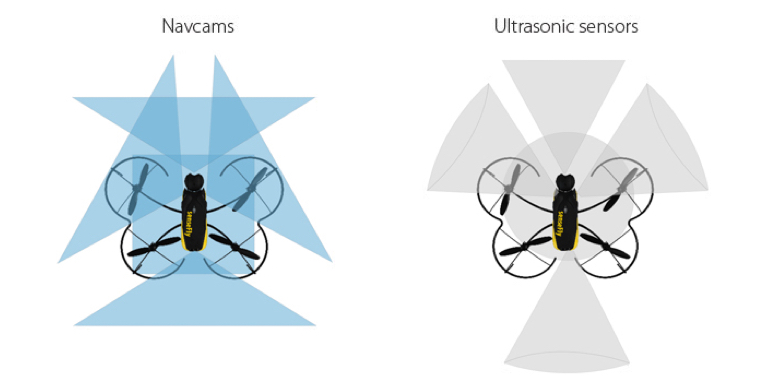
Cuenta con cinco sensores modulares duales que permiten obtener imágenes con resoluciones submilimétricas de estructuras y superficies de forma segura.
Obtenga la más completa flexibilidad de modo de vuelo. Elija entre un vuelo autónomo, guiado por GPS o un vuelo interactivo en vivo (streaming). Inclusive puede iniciar en modo autónomo y durante el vuelo cambiarlo a “en vivo».

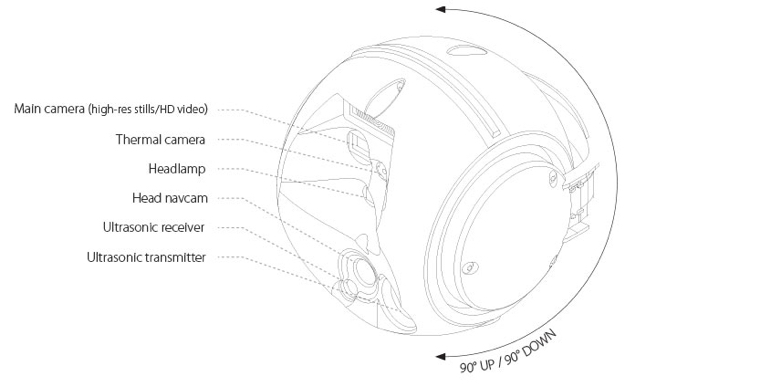
Posee los sensores con amplitudes de cámara más amplios que cualquier otro dron del mercado. Su cabezal de cámara TripleView estabilizado le permite cambiar entre las imágenes de vídeo HD y térmicas durante el vuelo, además, captura imágenes fijas de alta resolución. Los datos se pueden guardar para un análisis post-vuelo, y no necesita aterrizar para cambiar las cargas útiles.
El cabezal TripleView posee un rango de movimiento vertical de 180 grados, zoom digital de 6x, estabilización de gimbal activo y un campo de visión sin obstrucción debido a su diseño de marco de envolvente. El albris es capaz de alcanzar un GSD de hasta 1 mm a una distancia superficial de 6 m.
El albris está diseñado para realizar inspecciones en vivo de edificios y otras estructuras. Sus cámaras a bordo y sensores ultrasónicos le entregarán la información visual y de proximidad que necesita para tomar las decisiones correctas y maximizar las posibilidades de éxito de cada misión. El alto nivel de conocimiento del operador hace a albris particularmente adecuado para sitios sensibles o peligrosos, tales como acantilados, pilas de bengalas, puentes y más.

Totalmente autónomo: ¿Está buscando mapear un pequeño sitio, como una planta o un sitio de construcción, directamente desde arriba? O tal vez un punto específico de interés, como un edificio o torre? Si es así, elija una misión albris autónoma.
Función: Cartografía 2D de alta resolución, mapeo de edificios en 3D, monitoreo de la construcción, mapeo agrícola y arqueológico.
Modo Interactivo ScreenFly : ¿Necesita realizar una inspección en vivo? Utilice albris controlador ScreenFly para volar una misión interactiva asistida.
Función: Inspección estructural y documentación, detección de grietas / defectos, análisis de paneles solares, inspección de torres, etc.
Luego de que Albris aterrice, simplemente use el Administrador de datos de vuelo incorporado de eMotion X para procesar previamente, geotag y organizar sus imágenes, antes de iniciar el procesamiento de imágenes.
A continuación, utilice el software profesional de procesamiento de imágenes para transformar las imágenes del drone en orto-mosaicos georeferenciados, modelos de construcción 3D, nubes de puntos 3D, modelos de triángulo, modelos de superficie digital. El software Pix4Dmapper Incluye una función de Comprobación rápida, editores de mosaico y rayCloud y un productor de nubes de puntos.



Cree mapas en 2D y 3D de alta resolución, o complemente datos del dron, cartografiando superficies verticales o con mucha inclinación
Captura imágenes aéreas en alta resolución y las transforma en modelos 3D de edificios e infraestructuras de pequeño y mediano tamaño

Examina y documenta superficies y objetos tales como puentes , torres, tejados y la superficie de barrancos en alta resolución
Tipo
Cuadricóptero en forma de V
Motores
4 motores sin escobillas eléctrica
Hélices
4
Peso de despegue
1,7 Kg incluye batería cargada y cubierta
Tiempo de vuelo (sistema completo)
Hasta 22 min.
Máx. Tasa de ascenso
7 m/s (25 k/h)
Máx. velocidad aerodinámica
Vuelo automático: 8 m s; Vuelo manual: 12 m/s
Resistencia al viento
Automática: hasta 8 m/s; Manual: hasta 10 m/s
Piloto automático y Control
MU, magnetómetro, barómetro y GPS
Materiales
Cuerpo compuesto, brazos y piernas moldeados de fibra de carbono, marco moldeado de precisión de magnesio, plástico inyectado de precisión y moldeado.
Temperatura de funcionamiento
-10 to 40º C
Tipo
Digital, antenas omnidireccionales dobles, doble banda encriptada.
Frecuencia
2,4 GHz y 5 GHz bandas ISM (según el país)
Datos transmitidos
Comandos, corriente principal de la cámara, Corriente Navcam, datos de los sensores.
Alcance
Hasta 2 kms
Tipo
Digital
Frecuencia
2.4 GHz
Alcance
Hasta 800 mts
Tecnología
Batería Inteligente
Tipo
LiPo, de 3 celdas, 8500 mAh
Pantalla con nivel de energía
Pantalla LED en la batería, información en pantalla
Tiempo de Carga
1 – 1,5 Hrs
Tipo
4 CPUs a bordo
Procesador de cuatro núcleos
Piloto principal automático e inteligencia artificial
Procesador de doble núcleo
Video co procesamiento
Procesador de un sólo núcleo
Piloto automático de bajo nivel (de reserva de seguridad) y control de motor.
Procesador de un sólo núcleo
Gestión de enlaces de comunicación
Imágenes Fijas
38 MP, obturador mecánico
DNG (imagen RAW con metadatos corrección
distancia de muestreo terrestre (GSD):
– 1 mm / pixel a los 6 m
– 1 cm / pixel a 60 m
de grabación a bordo
Geo-referenciada (posición y orientación)
Video
HD (1280 x 720 pixels)
Grabadas a bordo o escuchados
Campo de visión horizontal
63 grados
Zoom digital
6x
Imágenes fijas/video
Térmicas (80 x 60 píxeles) superpuestos en corriente principal de la cámara
Campo de visión horizontal
50 grados
Realce de bordes
Sí
Video
VGA (640 x 480 pixels)
Vídeo gama transmisión en vivo
Hasta 2 km
Campo de visión horizontal
100 grados
Faro
Sí, utilizada para video.
Flash
Sí, no activa después del lanzamiento
Número
4 navcams
Posiciones
Izquierda, derecha, atrás, abajo.
Video
VGA (640 x 480 pixels)
Campo de visión horizontal
100 grados
Disponibilidad
Uno NavCam a la vez
Vistas laterales (y/o girar la cámara principal) y vuelo paralelo a lo largo de los objetos
Uso operacional
Marcha atrás con seguridad y control en entornos apretado Aterrizaje y proximidad en el terreno
Tipos
Automático Manual Interactivo ScreenFly (RC)
Disponibilidad
Cambiar entre los modos en cualquier momento
Control de Interfaz
Mousse, teclado o pantalla táctil
Planificación de la misión
Arrastrar y soltar los bloques de misión
Mapeo horizontal
Tipos de bloques de misión
Alrededor de punto de interés
Ruta definida por el usuario
Cambio de misión durante el vuelo
Sí: Cambios manuales de waypoint y actualizaciones posibles en cualquier momento
Interfaz de control primaria
Acciones basadas en pantallas y joypad
USB Control Crucero
Asistencia de vuelo (dependiendo de la fase de vuelo)
Distancia bloqueo
Evitación de obstáculos
Interfaz de control primario
RC (control remoto)
Fuente
Navcams (sensor visual)
Número
5
Video
VGA (640 x 480 píxeles)
Campo de visión horizontal
100 grados
Disponibilidad
Una NavCam a la vez
Sensor
Ultrasónico
Número
5
Alcance
Hasta 6 metros
Realimentación
Advertencia auditiva y visual objetos
Material
Fibra de carbono
Función
Define el área de rotación de la hélice
Protege de daños a baja velocidad
Luces de Navegación
2 verde a la derecha, 2 rojo a la izquierda
Luces anticolisión
1 estroboscópica superior, 1 inferior estroboscópica
Procedimiento de evitación
Parada automática (se puede desactivar)
Señales de advertencia
Audio & visual
Control de Crucero
Mantiene una velocidad (baja) constante en una dirección dada
Distancia de Bloqueo
Mantiene la distancia a objetos frontales 3-5 m
Evitación de obstáculos
Dependiendo de la fase de vuelo
Comportamientos automatizados a prueba de fallos
Georeferencia, regreso a casa, parada de emergencia, aterrizaje de emergencia
Operador desencadenado
Mantiene la posición, vuelve a casa, va hacia tierra, aterriza, corte del motor de emergencia
Tipo
Piloto automático independiente de nivel medio (copia de seguridad para el piloto automático)
Control RC Manual
Controlador RC Independiente (toma el control manual en cualquier momento)
Aplicación de software
SenseFly eMotion X (suministrado)
Intuitiva interfaz de usuario 3D
Haga clic y arrastre para establecer bloques de misión
Planificación de la misión
Planificación automática de vuelo 3D
Edición de la planificación de la misión durante el vuelo
Comprobaciones del sistema Automatizado
Despegue y aterrizaje automático
Estatus del vuelo en tiempo real
Integración con la cámara principal de video
Integración de Video termal
Vuelo
Integración de video con Navcam
Vuelo completamente automático
Screenfly interactivo
Vuelo Manual (con funciones de asistencia)
Durante su vuelo, se puede cambiar el modo de vuelo
Caja negra que graba todos los parámetros de vuelos y misiones
Proyecto y gestión de datos
Después del vuelo
Interfaz sin interrupciones para Pix4mapper
Conversión desde DNG a JPEG
Aplicación del Software
Pix4mapper (opcional)
Procesamiento rápido de chequeo
Calidad del reporte
Triangulación aérea automática (AAT) y Bloque Bundle de ajuste (BBA)
Editor de Nube de Puntos
Clasificación automática de nube de puntos y extracción DTM
Filtración y suavizado de la nube de puntos
Brillo automático y corrección de color
Visualización y edición de nube de puntos
Medición de Polilinea, superficies & stockpile
Herramientas de digitalización / objeto de edición de vectores
Vuela a través de la animación
Edición continua
Edición Mosaico
Selección plana de ortomosaico
Edición colores y brillo del mosaico
Resultados de salida
2D y 3D (ortoimagen, nube de punto, datos vectoriales, etc.) posición de la cámara optimizada, parámetros de orientación internos y externos, imágenes sin distorsiones








